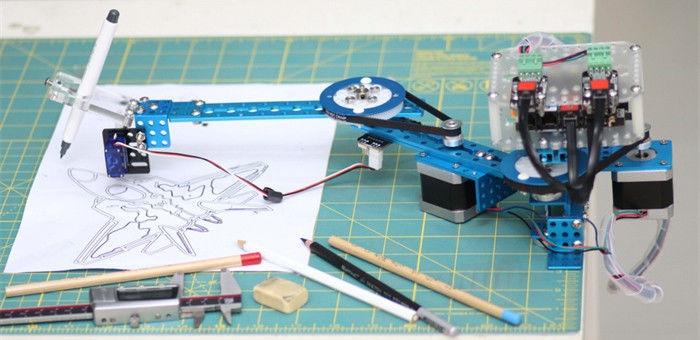
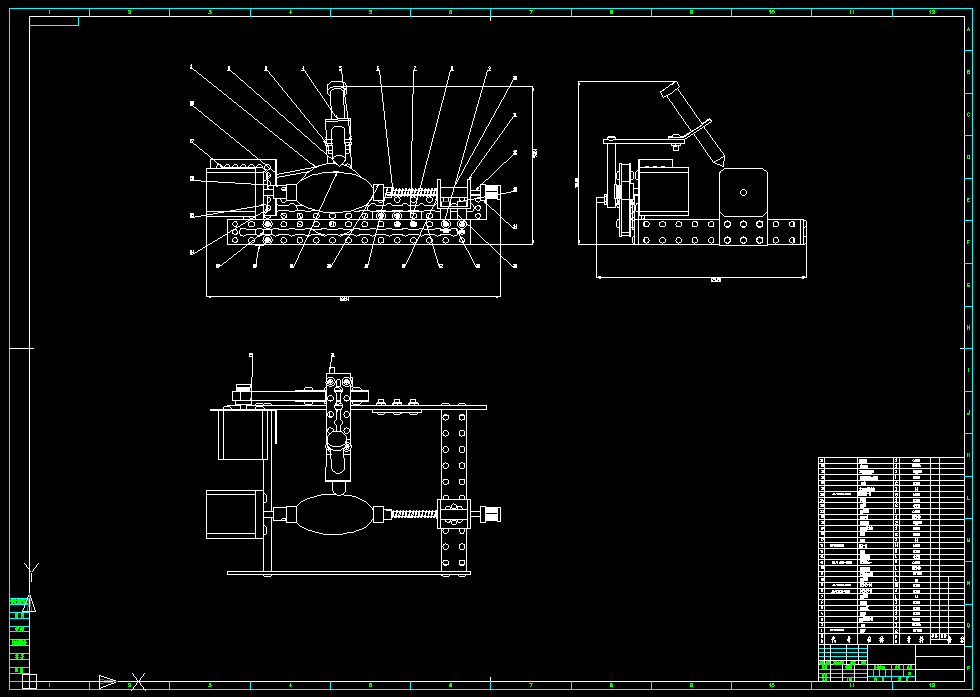
本设计内容为四自由度关节型机器人,主要对关节型机器人的操作臂进行系统的设计,机器人的末端操作器即手指是可替换夹具,操作臂有四个自由度,可实现在工作空间范围内的物体的转移,手爪一次可载荷0.5kg。 操作臂的动力源为舵机,总共有5个舵机,它们分别控制腰部旋转,大臂、小臂、手腕的摆动,以及手爪张合,本文设计的四自由度关节型机器人可用于小工作空间内完成对小质量物体的转移工作,同时也可以做为教学机器人。
手机快捷登录
该人才本日咨询量超出上限
建议发布需求或咨询顾问
服务商暂不支持电话联系
商家还未开通QQ咨询功能
给TA留言,服务商会尽快联系你
已收到你的初步意向
稍后你的企业专属顾问将致电你, 确认你的具体需求
根据监管要求,我们对《猪八戒平台隐私保护政策》进行了更新,现向您进行以下说明:
1.为更好地向您提供服务,我们会收集、使用您必要的个人信息;
2.我们会采用业界先进的加密算法,保护您的个人信息;
3.除非法律规定,在没有获得您的授权下,我们不会向第三方共享、转让和公开披露您的个人信息;
4.您可以查询、更正、删除您的个人信息,也可以注销您的个人账户。