
无人驾驶压路机软硬件开发自动控制
金桥网络旗舰店
客户信息
无人驾驶压路机采用自动控制、GNSS定位技术与毫米波雷达结合的方法,实现碾压工作的无人化、智能化。 控制现场使用无线通信的方式连接到PC端或者移动终端上,实现现场的无人驾驶的监测和参数设置。 控制器通
案例介绍
案例背景
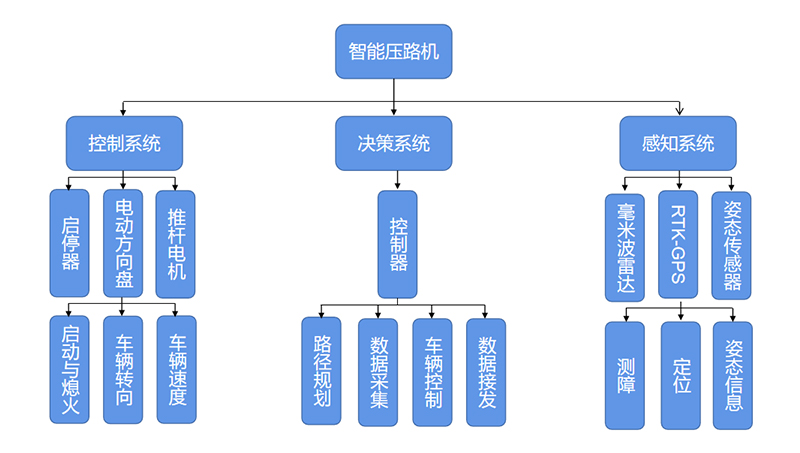
无人驾驶压路机采用自动控制、GNSS定位技术与毫米波雷达结合的方法,实现碾压工作的无人化、智能化。
控制现场使用无线通信的方式连接到PC端或者移动终端上,实现现场的无人驾驶的监测和参数设置。
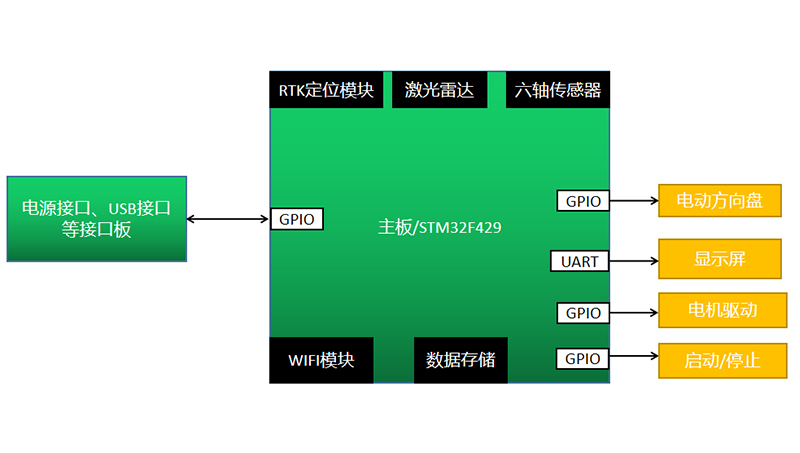
控制器通过电动方向盘、档位推杆电机、启停器等,实现无人驾驶的功能。
控制器外接传感器,实现无人驾驶路线的监测和运行状况监测。
亮点介绍
无人驾驶压路机采用自动控制、GNSS定位技术与毫米波雷达结合的方法,实现碾压工作的无人化、智能化。
控制现场使用无线通信的方式连接到PC端或者移动终端上,实现现场的无人驾驶的监测和参数设置。
控制器通过电动方向盘、档位推杆电机、启停器等,实现无人驾驶的功能。
控制器外接传感器,实现无人驾驶路线的监测和运行状况监测。
成果展示