


基于NXP16位处理器MC9S12系列的整车控制器产品
铂科新能源科技有限公司
客户信息
ECU厂商外包
案例介绍
案例背景
VCU产品贯彻了ISO 26262功能安全设计理
念,主控软件参考AUTOSAR架构设计,底层
协议栈和接口手工代码实现,应用层采用
Matlab基于模型的方式集成开发,过程遵循V
流程。
产品可作为通用电子控制单元(ECU)使
用,产品软件层和模块化。由底至顶设计了硬
件驱动层、板极板支持层、网络系统接口层、
算法层、部件和网络管理层、控制任务调度和
应用程序模块。
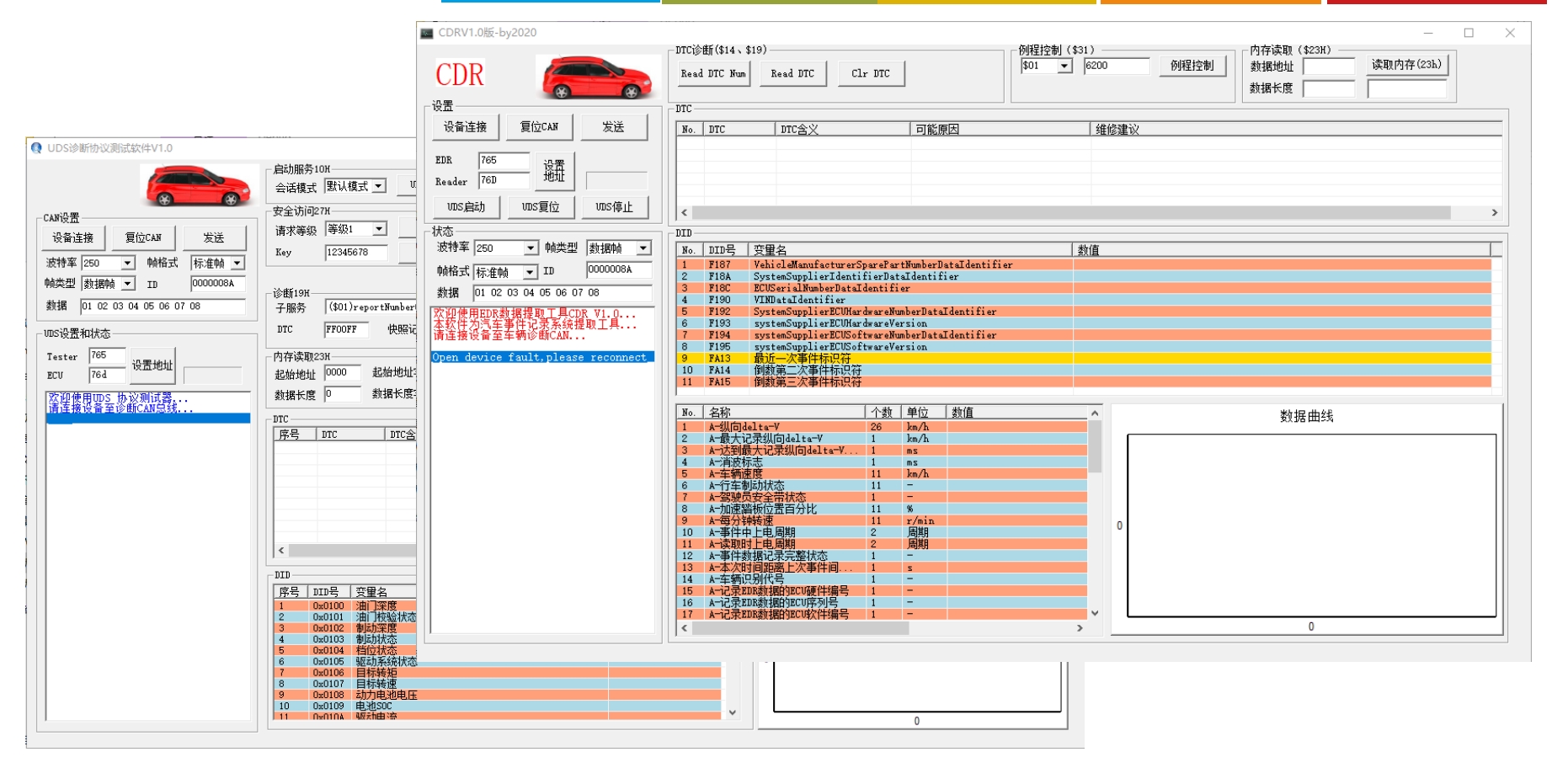
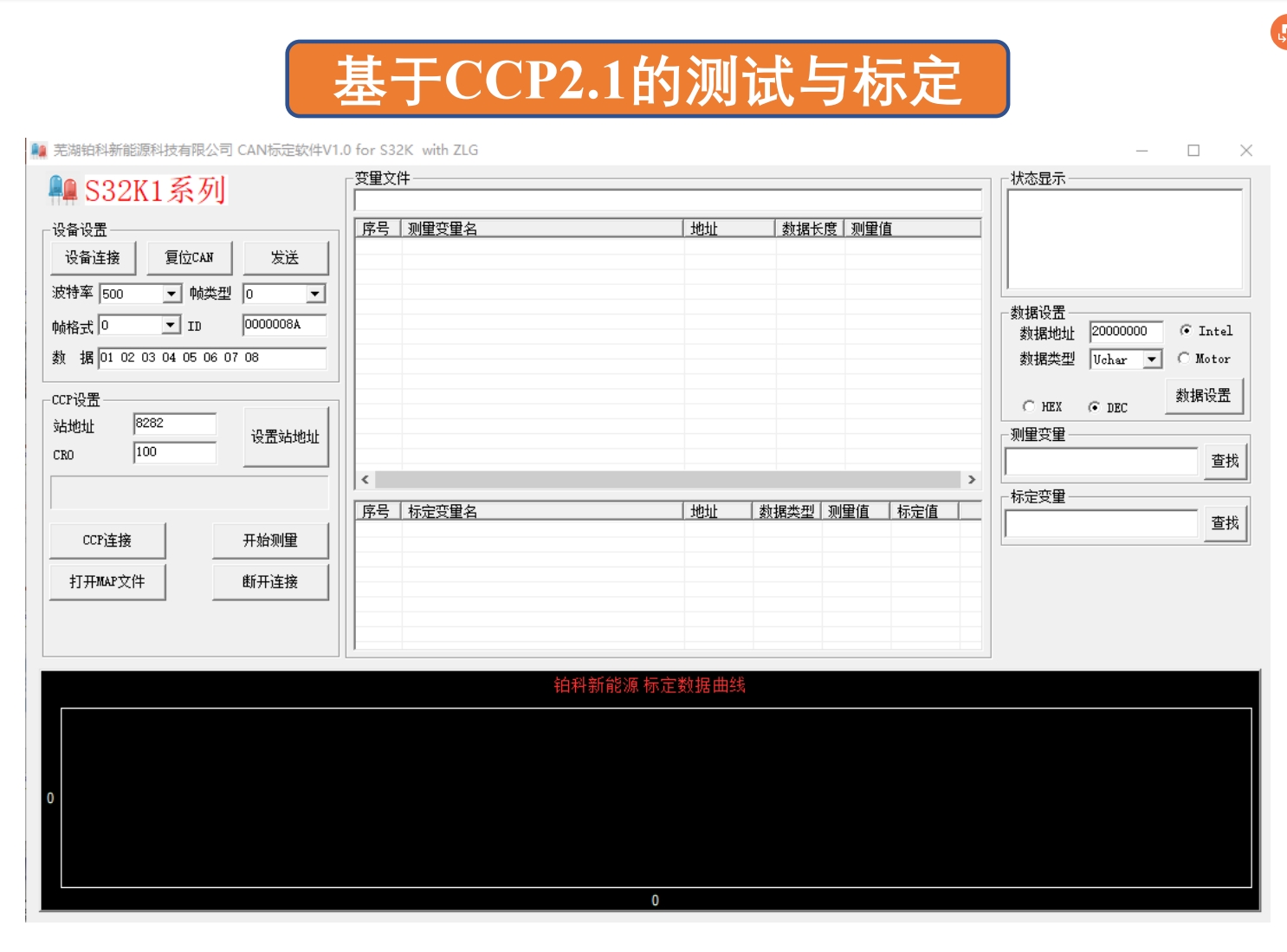
支持系统应用,自主开发了基于CAN总线
的bootloader、CCP标定协议栈、UDS诊断协
议栈。并为之开发了上位机软件。
亮点介绍
自主开发了基于CAN总线
的bootloader、CCP标定协议栈、UDS诊断协
议栈。并为之开发了上位机软件。
成果展示