

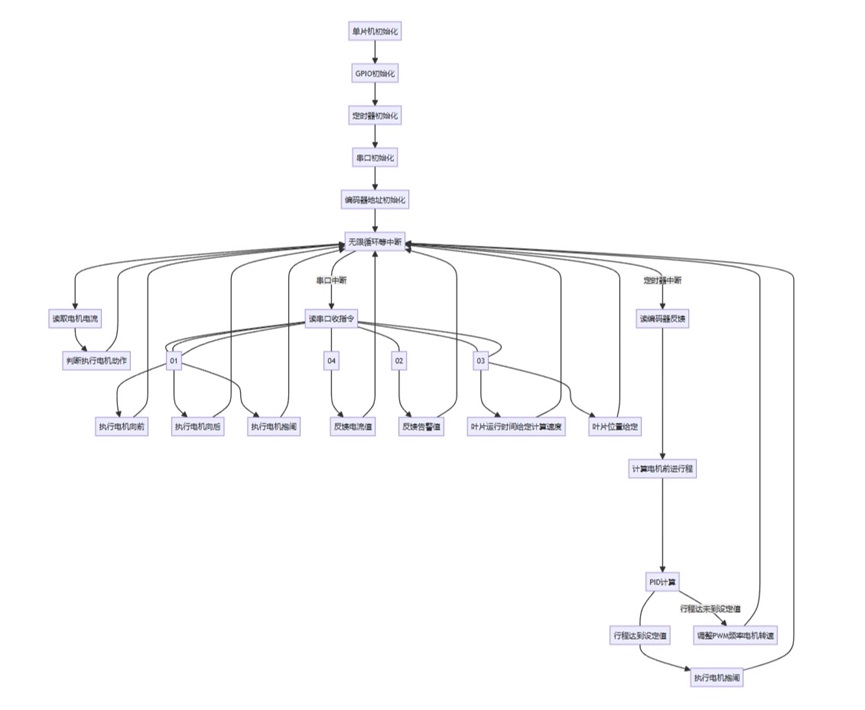
MLC准直器控制程序
案例介绍:
项目主要设计电机控制算法,神经网络PID调节和最小二乘法曲线直接设置占空比调节效果较理想,在需要速度低、大扭矩的情况下,选择电机的工作频率通常是选择较低的频率更好。这是因为在低频率下,电机可以提供更大的扭矩输出,同时减少了电机的机械和电磁损耗。较低的频率还可以降低电机的噪音和振动水平,提高电机的稳定性和寿命。最小二乘法曲线直接设置占空比工作频率最低,建议选为控制方法,不过最后还要在硬件上实测做最后决定,神经网络也要实测一下,和最小二乘法对比一下。根据最新对比结果,最小二乘法存在速度漂移,静差过大,多次运行结果差异较大,当前频率下同样的设置占空比58771多次运行平均速度出现了大的差异,不上PID调速恐怕不行。神经网络PID平均速度稳定接近设定速度,而且200KHZ频率应该是电机可承受工作频率。在位置式PID上重做了速度占空比公式,freq = speed*FEEDBACK_CONST*1000*360/200000, 实验结果也算理想,这个可能是PID调节的最后选择手段。
神经网络PID调节和最小二乘法曲线直接设置占空比调节效果较理想,在需要速度低、大扭矩的情况下,选择电机的工作频率通常是选择较低的频率更好。这是因为在低频率下,电机可以提供更大的扭矩输出,同时减少了电机的机械和电磁损耗。较低的频率还可以降低电机的噪音和振动水平,提高电机的稳定性和寿命。最小二乘法曲线直接设置占空比工作频率最低,建议选为控制方法,不过最后还要在硬件上实测做最后决定,神经网络也要实测一下,和最小二乘法对比一下。根据最新对比结果,最小二乘法存在速度漂移,静差过大,多次运行结果差异较大,当前频率下同样的设置占空比58771多次运行平均速度出现了大的差异,不上PID调速恐怕不行。神经网络PID平均速度稳定接近设定速度,而且200KHZ频率应该是电机可承受工作频率。在位置式PID上重做了速度占空比公式,freq = speed*FEEDBACK_CONST*1000*360/200000, 实验结果也算理想,这个可能是PID调节的最后选择手段。
神经网络PID调节和最小二乘法曲线直接设置占空比调节效果较理想,在需要速度低、大扭矩的情况下,选择电机的工作频率通常是选择较低的频率更好。这是因为在低频率下,电机可以提供更大的扭矩输出,同时减少了电机
神经网络PID调节和最小二乘法曲线直接设置占空比调节效果较理想,在需要速度低、大扭矩的情况下,选择电机的工作频率通常是选择较低的频率更好。这是因为在低频率下,电机可以提供更大的扭矩输出,同时减少了电机
