

基于点云和图像融合的的三维目标检测技术
计算机博士兼职
客户信息
计算机方向博士
案例介绍
案例背景
驾驶场景下的三维目标检测任务中,车路/车车协同的目标检测是解决全 场景感知的重要方法。其中,已有方法往往会将获取到的数据或者特征全部 传递来实现对全场景的目标准确感知。然而,传递全部信息对传输的带宽需 要很大的要求,而且这对于自车能够准确定位的目标根本不需要从其他端获 取相应的数据。
亮点介绍
第一,本章提出一种基于分割的融合策略,突出了前景特征的重要性。这 种选择性融合在优化带宽使用方面起到了关键作用,通过聚焦于自动驾驶任 务中最相关的数据,从而减少了无关背景信息的传输。
第二,本章提出了遮挡感知的车路特征融合方法,该方法实现了车辆视
野中的目标遮挡程度的预测,并利用遮挡程度的预测来选择有效融合特征区
域,实现了检测精度和通信量上的有效平衡。
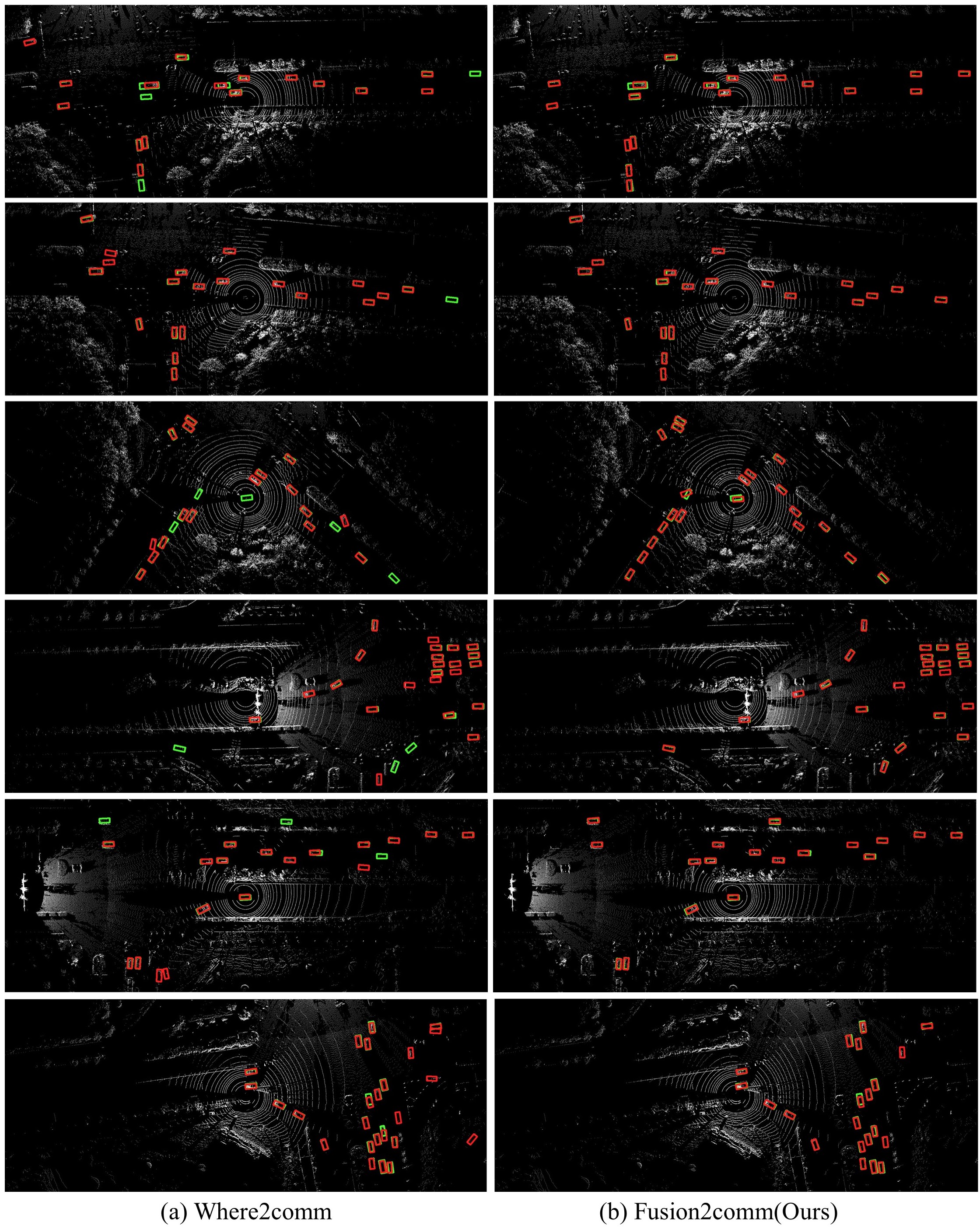
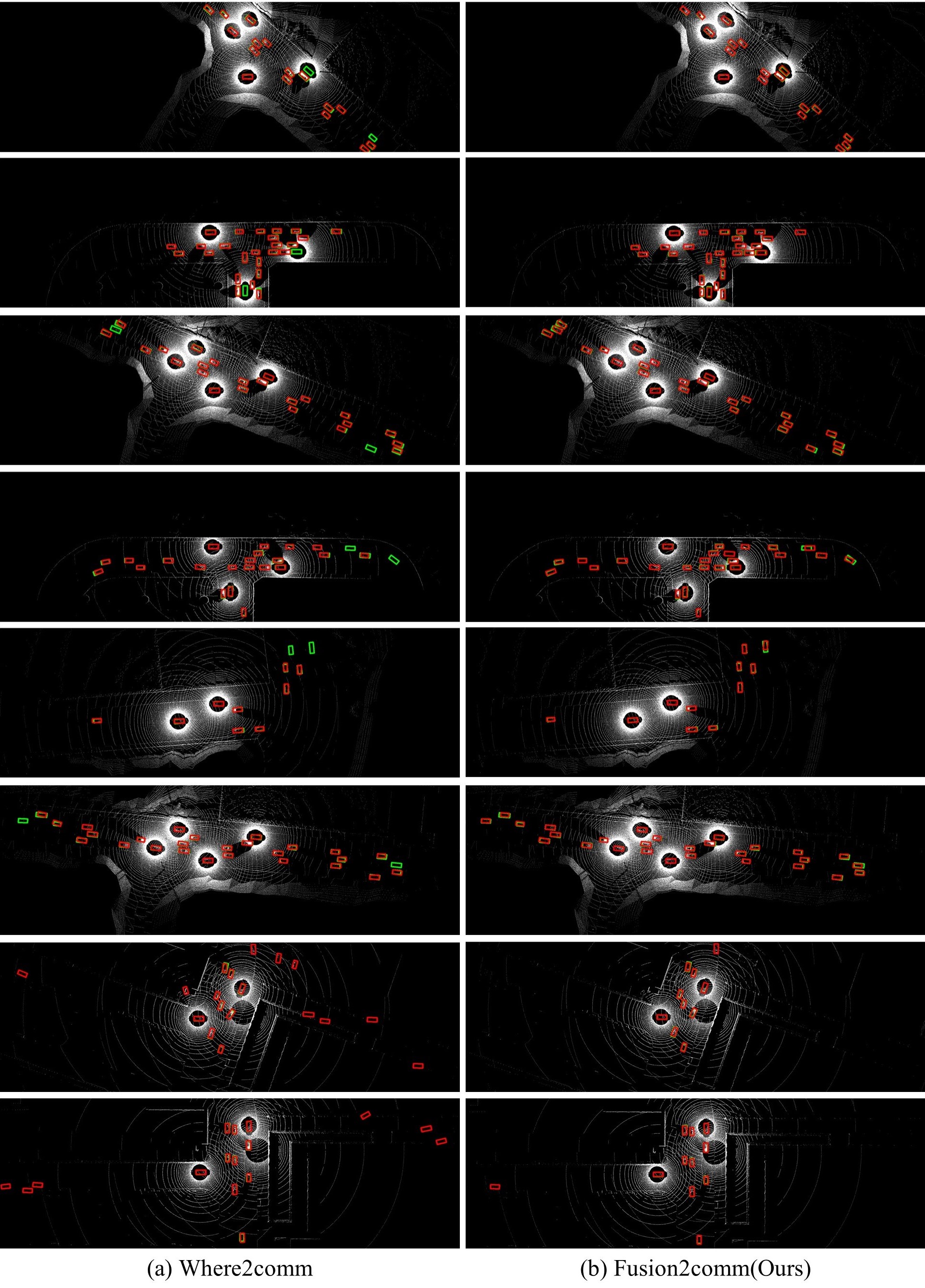
第三,在车路/车车协同三维目标检测任务上,基于三个典型数据集 DAIR- V2X[147]、V2XSet[149]、OPV2V[148],本文提出的车路融合框架相较于基线方 法 Where2comm[146]实现了检测精度性能大幅提升。数据集上的实验结果表 明,本章方法在检测精度和通信效率方面都取得了显著进步。这种双重改善 展示了本章方法在实际应用中的有效性,为车路/车车协同感知设置了新的性 能标准。
成果展示